卫星绕地球旋转轨道运行实现(附结果和matlab代码)
完成轨道在2D、3D图像上的绘制。
卫星绕地球旋转轨道运行实现(附结果和matlab代码)
运行结果
先看结果:
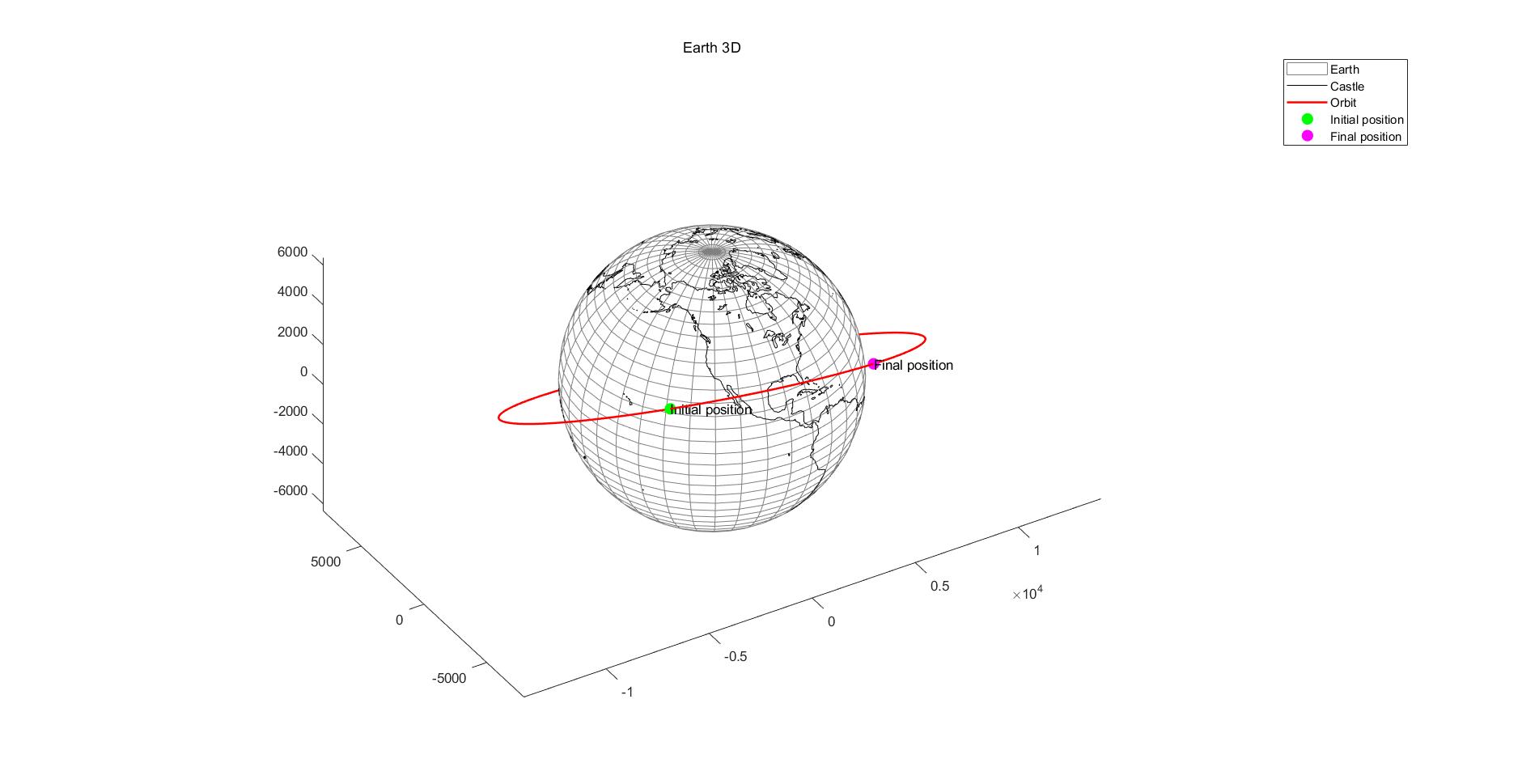 3D模型
3D模型
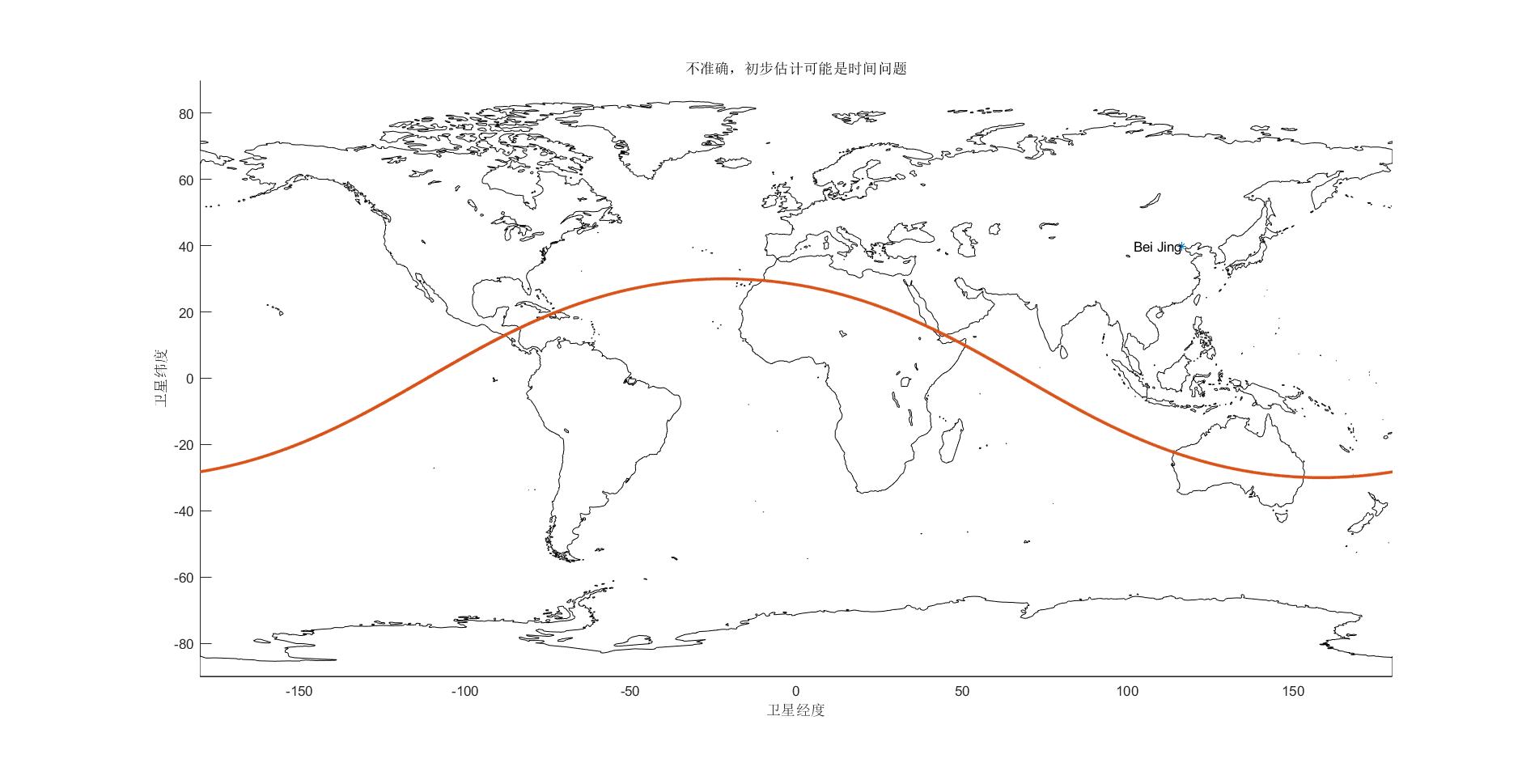 2D
2D
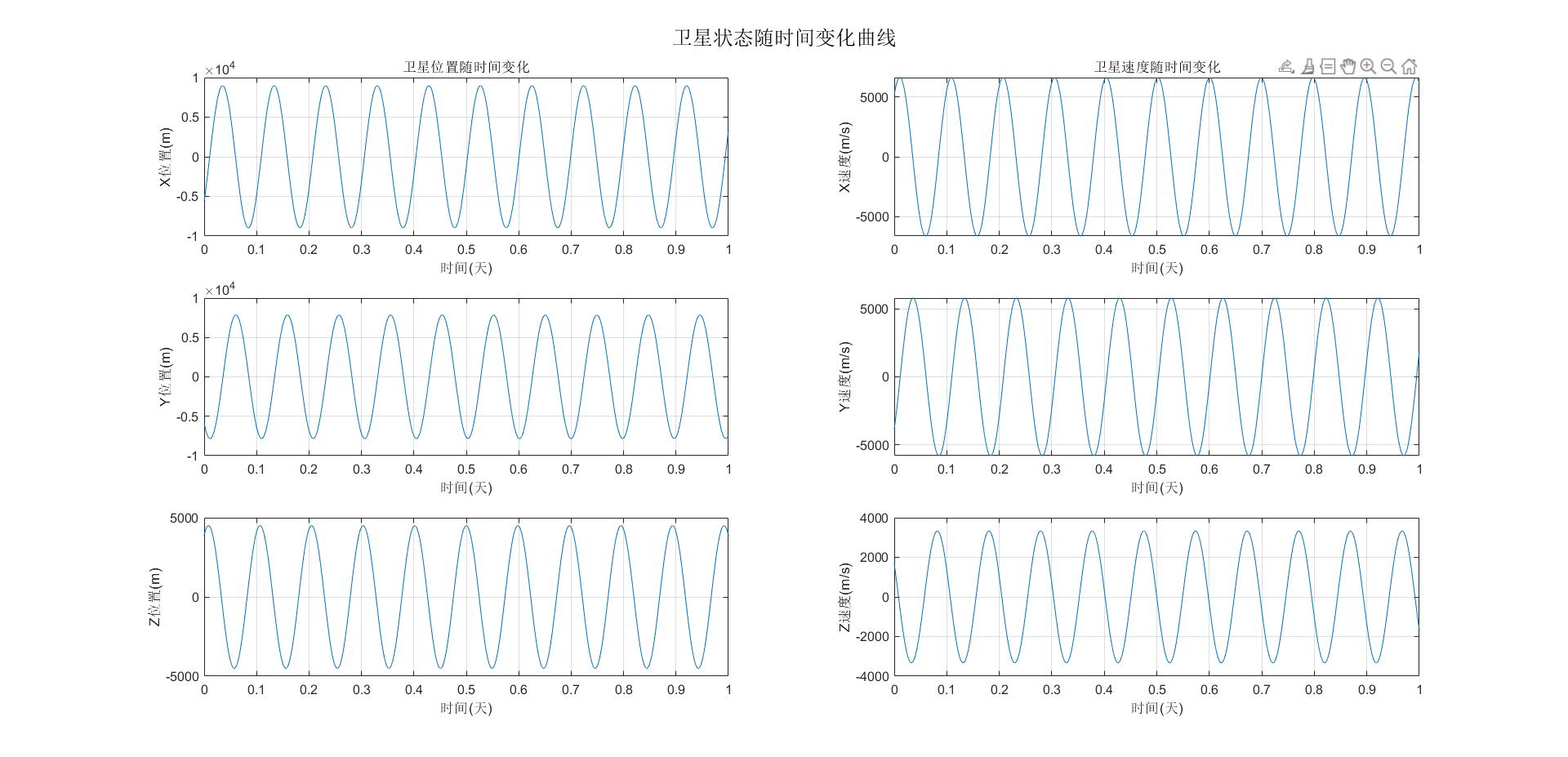 卫星状态信息
卫星状态信息
代码
earth.m
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
%% 基本数据
G = 6.67430e-11; % 万有引力常数,单位:m^3/(kg*s^2)
M_earth = 5.972e24; % 单位:千克
M_moon = 7.348e22; % 单位:千克
R_earth = 6371e3; % 地球半径,单位:m(转换为米以便单位统一)
%% 绘制地球模型
Globe_3D=plot_Globe_3D; %3d模型
Globe_2D=plot_Globe_2D; %2d模型
% figure(Globe_3D);
% plot3(-2439e3,-3367e3,5826e3,'*');
%% 绘制卫星模型
% 卫星轨道基本信息
% 轨道六根数
initial_params = struct();
initial_params.a = 9000e3; % 半长轴,单位为米
initial_params.e = 0.001; % 偏心率
initial_params.i = deg2rad(30); % 倾角,转换为弧度
initial_params.Omega = deg2rad(10); % 升交点赤经,转换为弧度
initial_params.w = deg2rad(120); % 近地点幅角,转换为弧度
initial_params.nu = deg2rad(0); % 真近点角,转换为弧度
initial_params.mass = 500; % 卫星质量,单位为千克
initial_params.time = 1*86400; % 卫星运行时间,单位为秒,1天 = 86400秒
%% 调用轨道函数
funs=orbit_functions;
% 轨道六根数转换为ECI坐标系位置、速度矢量信息
[initial_params.position,initial_params.velocity]=funs.orbital2pv(initial_params);
% 获取卫星轨道速度、位置、运行时刻信息
[initial_params.position,initial_params.velocity,initial_params.t]=funs.orbit_draw(initial_params);
% 从ECI坐标系转换为ECEF坐标系
initial_params.position_ecef = funs.eci2ecef(initial_params);
% 转经纬度
[initial_params.llh]=funs.ecef2latlon(initial_params.position_ecef);
% 打印卫星信息
disp(initial_params);
%% 绘制卫星轨道
% 3D模型
figure(Globe_3D);
plot3(initial_params.position.x, initial_params.position.y, initial_params.position.z, 'r-', 'LineWidth', 1.5);
% 绘制初始位置
plot3(initial_params.position.x(1), initial_params.position.y(1), initial_params.position.z(1), 'go', 'MarkerSize', 8, 'MarkerFaceColor', 'g');
text(initial_params.position.x(1), initial_params.position.y(1), initial_params.position.z(1), 'Initial position');
% 绘制最终位置
plot3(initial_params.position.x(end), initial_params.position.y(end), initial_params.position.z(end), 'mo', 'MarkerSize', 8, 'MarkerFaceColor', 'm');
text(initial_params.position.x(end), initial_params.position.y(end), initial_params.position.z(end), 'Final position');
% 图像标签说明
legend('Earth', 'Castle','Orbit', 'Initial position', 'Final position');
% 2D模型
figure(Globe_2D);
plot(116.3912757,39.906217,'*'); %北京坐标
text(116.3912757,39.906217,'Bei Jing','HorizontalAlignment','right');
plot(initial_params.llh.longitude,initial_params.llh.latitude,'.');
title('不准确,初步估计可能是时间问题');
%% 绘制卫星状态随时间变化曲线
figure;sgtitle('卫星状态随时间变化曲线');
subplot(3,2,1);plot(initial_params.t/86400,initial_params.position.x);grid on;xlabel('时间(天)');ylabel('X位置(m)');title('卫星位置随时间变化');
subplot(3,2,3);plot(initial_params.t/86400,initial_params.position.y);grid on;xlabel('时间(天)');ylabel('Y位置(m)');
subplot(3,2,5);plot(initial_params.t/86400,initial_params.position.z);grid on;xlabel('时间(天)');ylabel('Z位置(m)');
subplot(3,2,2);plot(initial_params.t/86400,initial_params.velocity.vx);grid on;xlabel('时间(天)');ylabel('X速度(m/s)');title('卫星速度随时间变化');
subplot(3,2,4);plot(initial_params.t/86400,initial_params.velocity.vy);grid on;xlabel('时间(天)');ylabel('Y速度(m/s)');
subplot(3,2,6);plot(initial_params.t/86400,initial_params.velocity.vz);grid on;xlabel('时间(天)');ylabel('Z速度(m/s)');
函数库
orbit_functions.mlx
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
轨道函数
function funs = orbit_functions
% 轨道六根数转换为位置、速度矢量信息
funs.orbital2pv = @orbital2pv;
% 绘制卫星轨道
funs.orbit_draw = @orbit_draw;
% ECI转ECEF坐标系
funs.eci2ecef=@eci2ecef;
% 坐标系转换为经纬度坐标
funs.ecef2latlon = @ecef2latlon;
end
orbital_to_pv
轨道六根数转换为位置、速度矢量信息
function [x,y] = orbital2pv(initial_params)
% 轨道六根数转换为ECI坐标系位置、速度矢量信息
% 输入:
% initial_params - 结构体,包含卫星所有信息
% 输出:
% x - 结构体,包含卫星位置x, y, z字段
% y - 结构体,包含卫星速度vx, vy, vz字段
%% 基本数据
G = 6.67430e-11; % 万有引力常数,单位:m^3/(kg*s^2)
M_earth = 5.972e24; % 地球质量,单位:kg
mu = G * M_earth; % 地球引力参数,单位:m^3/s^2
% 1. 计算轨道半径大小
r = initial_params.a * (1 - initial_params.e^2) / (1 + initial_params.e * cos(initial_params.nu));
% 2. 计算近焦点坐标系中的位置向量 (r_x, r_y, 0)
r_pqw = [
r * cos(initial_params.nu); % x分量
r * sin(initial_params.nu); % y分量
0 % z分量(轨道平面内)
];
% 3. 计算近焦点坐标系中的速度向量
v_pqw_magnitude = sqrt(mu / (initial_params.a * (1 - initial_params.e^2)));
v_pqw = [
-v_pqw_magnitude * sin(initial_params.nu); % x分量
v_pqw_magnitude * (initial_params.e + cos(initial_params.nu)); % y分量
0 % z分量
];
% 4. 构建坐标系转换矩阵(近焦点坐标系 -> 惯性坐标系)
% 旋转顺序:升交点赤经 -> 倾角 -> 近地点幅角
R3_Omega = [
cos(initial_params.Omega), sin(initial_params.Omega), 0;
-sin(initial_params.Omega), cos(initial_params.Omega), 0;
0, 0, 1
];
R1_i = [
1, 0, 0;
0, cos(initial_params.i), sin(initial_params.i);
0, -sin(initial_params.i), cos(initial_params.i)
];
R3_w = [
cos(initial_params.w), sin(initial_params.w), 0;
-sin(initial_params.w), cos(initial_params.w), 0;
0, 0, 1
];
% 总转换矩阵
M = R3_Omega * R1_i * R3_w;
% 5. 转换到惯性坐标系
initial_params.position = M * r_pqw; % 位置向量,单位:米
initial_params.velocity = M * v_pqw; % 速度向量,单位:米/秒
x=initial_params.position;
y=initial_params.velocity;
end
绘制卫星轨道
function [initial_params_p,initial_params_v,initial_params_t] = orbit_draw(initial_params)
% 绘制卫星轨道
% 输入:
% initial_params - 结构体,包含卫星所有信息
% 输出:
% initial_params_p - 结构体,包含卫星位置x, y, z字段
% initial_params_v - 结构体,包含卫星速度vx, vy, vz字段
% initial_params_t - 数组,包含卫星运行时刻信息
% 基本数据
G = 6.67430e-11; % 万有引力常数,单位:m^3/(kg*s^2)
M_earth = 5.972e24; % 地球质量,单位:kg
% 状态向量:[x, y, z, vx, vy, vz]
initial_state = [initial_params.position; initial_params.velocity];
%% 时间设置
% 模拟时间:1天 = 86400秒,这里模拟3天
tspan = [0, initial_params.time];
%% 使用ode45求解
options = odeset('RelTol', 1e-10, 'AbsTol', 1e-10);
[initial_params_t, state] = ode45(@(t, y) satellite_dynamics(t, y, G, M_earth), tspan, initial_state, options);
%% 提取结果
initial_params_p = struct();
initial_params_p.x = state(:, 1) / 1e3; % 转换为米
initial_params_p.y = state(:, 2) / 1e3;
initial_params_p.z = state(:, 3) / 1e3;
initial_params_v = struct();
initial_params_v.vx = state(:, 4);
initial_params_v.vy = state(:, 5);
initial_params_v.vz = state(:, 6);
% 定义运动方程
% 状态向量 y = [x, y, z, vx, vy, vz]
function dydt = satellite_dynamics(~, y, G, M_earth)
x = y(1);
y_pos = y(2);
z = y(3);
vx = y(4);
vy = y(5);
vz = y(6);
% 计算到地心的距离
r = sqrt(x^2 + y_pos^2 + z^2);
% 万有引力加速度 (只考虑地球引力)
ax = -G * M_earth * x / r^3;
ay = -G * M_earth * y_pos / r^3;
az = -G * M_earth * z / r^3;
% 一阶微分方程组
dydt = [vx; vy; vz; ax; ay; az];
end
end
ECI转ECEF坐标系
function ecef = eci2ecef(initial_params)
% ECI坐标转ECEF坐标
% 输入:
% initial_params - 结构体,包含卫星所有信息
% 输出:
% ecef - 结构体,包含x, y, z字段,均为n行1列的ECEF坐标
% 确保输入坐标为列向量
x_eci = initial_params.position.x;
y_eci = initial_params.position.y;
z_eci = initial_params.position.z;
time = initial_params.time;
% 获取数据点数
n = length(x_eci);
% 计算格林尼治恒星时(GST),单位:弧度
gst = 2*pi*(0.7790572732640 + 1.00273781191135448*time/86400);
gst = mod(gst, 2*pi); % 确保在0到2π之间
% 构建旋转矩阵(ECI到ECEF)
R = [cos(gst) sin(gst) 0;
-sin(gst) cos(gst) 0;
0 0 1];
% 初始化ECEF坐标
x_ecef = zeros(n, 1);
y_ecef = zeros(n, 1);
z_ecef = zeros(n, 1);
% 批量转换每个点的坐标
for i = 1:n
% 提取ECI坐标向量
eci_vec = [x_eci(i); y_eci(i); z_eci(i)];
% 应用旋转矩阵得到ECEF坐标
ecef_vec = R * eci_vec;
% 存储结果
x_ecef(i) = ecef_vec(1);
y_ecef(i) = ecef_vec(2);
z_ecef(i) = ecef_vec(3);
end
% 构建输出结构体
ecef = struct('x', x_ecef, 'y', y_ecef, 'z', z_ecef);
end
xyz坐标系转经纬度
function llh = ecef2latlon(ecef)
% ECEF坐标转经纬度和高度
% 输入:
% ecef - 结构体,包含x, y, z字段,均为n行1列的ECEF坐标(单位:米)
% 输出:
% llh - 结构体,包含:
% longitude - 经度(度),n行1列
% latitude - 纬度(度),n行1列
% height - 大地高(米),n行1列
% 确保输入为列向量
x = ecef.x(:);
y = ecef.y(:);
z = ecef.z(:);
n = length(x);
% WGS84椭球参数
R = 6371008.7714; % 常用的地球平均半径
% 初始化输出
longitude = zeros(n, 1);
latitude = zeros(n, 1);
height = zeros(n, 1);
% 批量转换每个点
for i = 1:n
% 计算地心距离(球心高度)
r = sqrt(x(i)^2 + y(i)^2 + z(i)^2);
height(i) = r - R; % 相对于球体表面的高度
% 计算经度(弧度)
lon_rad = atan2(y(i), x(i));
longitude(i) = rad2deg(lon_rad);
% 确保经度在[-180, 180]范围内
if longitude(i) > 180
longitude(i) = longitude(i) - 360;
elseif longitude(i) < -180
longitude(i) = longitude(i) + 360;
end
% 计算纬度(弧度) - 球体模型下简化计算
lat_rad = asin(z(i) / r);
latitude(i) = rad2deg(lat_rad);
end
% 构建输出结构体
llh = struct('longitude', longitude, 'latitude', latitude, 'height', height);
end
疑问
其实仔细观察可以发现,3D和2D图像中轨道对于地球的位置不一致,且误差不小,笔者初步估计是因为一开始时间系统设计不严谨,导致ECI坐标系转ECEF坐标系中时间、角度产生偏差,还需继续优化,如果理解不对欢迎批评、讨论。
This post is licensed under CC BY 4.0 by the author.